Projet YOCTO : Build d’une image Linux-RT pour Beaglebone Black
La carte Beaglbone black (BBB) est une plateforme embarquée open source utilisée dans plusieurs domaines éducationnels ainsi qu’industriels. Equipée d’un SOC am335x de Texas Instrument, cette plateforme est capable de tourner différents systèmes d’exploitation comme Linux, Android, WinCE…
Dans certaines applications, notamment dans le domaine industriel, il est parfois exigé d’avoir une performance temps réel du system, ce qui nécessite l’utilisation d’une solution temps réel soit software ou hardware. Dans cet article, nous allons s’intéresser à une solution software open source dédiée au system Linux connue sous le nom : le projet PREEMPT_RT.
“Controlling a laser with Linux is crazy, but everyone in this room is crazy in his own way. So, if you want to use Linux to control an industrial welding laser, I have no problem with your using PREEMPT_RT.” – Linus Torvalds
Le projet PREEMPT_RT (fondé et maintenu par Thomas Gleixner, Ingo Molnar et de nombreux autres collaborateurs) offre une solution temps réel « souple » qui se présente sous forme d’un patch qu’on peut appliquer sur un noyau Linux standard pour améliorer ses performances pour le temps réel. L’application du patch PREEMPT_RT se fait sur le code source d’un noyau Linux avant sa compilation. Toutefois, comme le patch n’est disponible que pour des versions majeures et mineures bien précises du noyau Linux standard, l’application du patch peut s’avérer d’une grande complexité à cause des problèmes de compatibilité.
L’objectif de cet article est d’investiguer une technique automatisée de construction d’image Linux embarqué avec le fameux projet Yocto, ceci, en construisant une image Linux patchée avec PREEMPT_RT pour la cible BBB. Dans La première partie, une introduction au système de construction du projet Yocto et de ses importants outils est présentée. Dans la deuxième partie, nous allons voir la configuration réalisée pour la construction d’une image Linux-RT basée sur un noyau fourni par Texas Instrument, puis, nous concluons par faire une comparaison de la performance offerte par cette solution temps réel, par rapport à une implémentation Linux normal.
Projet Yocto
Le projet Yocto est un projet collaboratif, open source, créé par la fondation Linux en 2011 avec l’objectif de fournir et de créer des outils et processus interopérables pour la construction des images Linux personnalisées dédiées aux systèmes embarqués et IoT, peut-import leurs architectures hardware. Le projet Yocto offre un environnement de développement flexible, qui permet aux développeurs de systèmes embarqués de collaborer à travers une technologie partagée de piles logicielles, de configurations et des meilleures pratiques utilisées pour créer des images Linux personnalisées.
Ce projet est basé sur une plateforme appelée OpenEmbedded créée en 2003, qui est une plateforme de compilation croisée automatisée, dédiée à la construction des images Linux embarquée. Le system de construction de cette plateforme utilise un outil qui s’appelle Bitbake, similaire à l’outil GNU Make, et qui permet de spécifier les scriptes de construction - appelée « recettes » dans le langage Bitbake - d’un package donné. Les recettes Bitbake (extension .bb) incluent la liste des dépendances de chaque package, la location du source code, et toutes autres informations nécessaires qui permettent aux outils d’OpenEmbedded de créer une image Linux bootable.
Dans la repos officielle ( 🕊 j’ai l’habitude d’utiliser le mot “la repos” à la place de “ le dépôt” conformément au mot anglais dominant : Repository ) du projet Yocto : git.yoctoproject.org, nous trouvons une distribution de référence appelée Poky, qui contient le système de construction OpenEmbedded plus un ensemble de métadonnées permettant aux développeurs d’amorcer la construction de leurs distributions personnalisées. Cette référence est fournie comme une spécification de base et elle permet - out of the box - de construire une image bootable pour un système embarqué typique.
La figure ci-dessous illustre la relation de Poky avec le reste du projet :
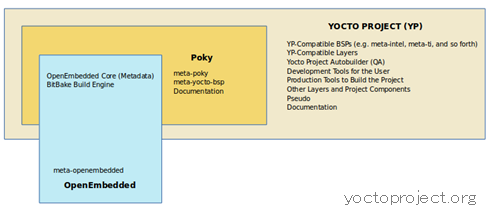
Pour en savoir plus sur Poky, voir le lien : Reference Embedded Distribution (Poky)
Modèle en couche
L’un des points forts du projet Yocto et que chaque aspect de construction est contrôlé via des métadonnées. En effet, Il est possible d’ajouter/modifier des couches de métadonnées permettant l’ajout de nouvelles piles logicielles, du support pour le nouveau hardware (Board Support Packages) ou même créer des nouveaux types d’images (image minimale, basique…).
Le modèle en couche du projet Yocto sert à isoler les différentes personnalisations ajoutées, dans le but d’améliorer la flexibilité et la réutilisabilité de ses différents processus de construction : plus la structure est modulaire plus et facile de coopérer avec les changements futurs.
Chaque couche Yocto respecte une hiérarchie bien précise, permettant de garder la compatibilité et la portabilité avec les autres couches du projet. Par commodité d’utilisation, le nom des couches Yocto commence toujours par le préfix meta- . Ci-dessous, la composition typique d’une couche Yocto :
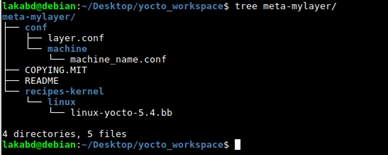
Une couche Yocto est composée d’un dossier obligatoire conf qui contient :
-
Un fichier de configuration
layer.confindiquant les différentes recettes offertes par cette couche. -
Un dossier machine qui contient le fichier de configuration
machine.conflié à la plateforme cible.
Plus des dossiers de recettes qui ajoutent le support de nouvelles fonctionnalités, ou étendent celles existantes déjà dans autres couches (fichiers .bbappend). Dans la couche de la figure ci-dessus, nous trouvons, en plus du conf, le dossier recipes-kernel qui contient une recette Bitbake (.bb) pour la construction d’un noyau Linux.
Couche BSP
En effet, les couches Yocto qui ajoutent du support à des nouvelles machines sont appelées des couches BSP (Board Support Packages). Il s’agit d’une collection d’instructions et d’informations (des métadonnées) qui définit comment prendre en charge un système ou périphérique matériel. Elles incluent des informations sur les fonctionnalités matérielles présentes sur le périphérique, les informations de configuration du noyau ainsi que tout pilote matériel supplémentaire requis. Elles ajoutent également tous les composants logiciels supplémentaires en addition au stack Linux, pour les fonctionnalités du périphérique essentielles et facultatives.
Bitbake
BitBake se trouve au cœur du système de build OpenEmbedded. C’est un système générique d’exécution de tâches (écrit en Python), qui permet aux tâches shell et Python d’être exécutées efficacement et en parallèle tout en travaillant dans des contraintes de dépendance inter-tâches complexes.
Conceptuellement, BitBake est similaire à GNU Make à certains égards :
-
BitBakeexécute les tâches en fonction des métadonnées fournies de chaque package. Les métadonnées sont stockées dans les fichiers recettes (.bb), fichiers de configuration (.conf) et de classe (.bbclass) qui fournissent àBitBaketoutes les instructions sur les tâches à exécuter et leurs interdépendances. -
BitBakeinclut toute une bibliothèque dédier à la récupération du code source de divers endroits (systèmes de contrôle de source, serveurs Web,…) et qui supporte plusieurs protocoles : git, https, ftp, file, ssh… -
Bitbakeutilise un model client/serveur, qui permet de l’utiliser à partir de la ligne de commande ou comme un service via XML-RPC.
Les recettes Bitbake :
Ce sont des fichiers désignés par l’extension .bb, et ils représentent les briques élémentaires des métadonnées. Chaque fichier recette, fournit toutes les informations nécessaires à la construction du package correspondant. Ces informations sont organisées dans des variables ou codées dans des fonctions prédéfinies par Bitbake :
-
Une description du package : Dans la variable
DESCRIPTION. -
La version de la recette : Dans la variable
PV. -
Les dépendances existantes : Dans la variable
DEPENDS. -
La location du source code du package : Dans la variable
SRC_URI. -
La location des différents patches à appliquer au code source, s’il y en existe : Dans la variable
SRC_URI. -
Comment configurer et compiler le code source : Dans les fonction
do_configure()etdo_compile() -
Où installer le package : Dans la fonction
do_install()
En addition, les recettes Bitbake utilisent une convention de nommage standard qui inclut le nom du package plus sa version dans le nom de la recette. C’est une règle de nommage à respecter, comme ces valeurs sont automatiquement prises par Bitbake et lui permet de localiser toutes les recettes disponibles et leurs versions correspondantes. Le format attendu du nom d’une recette est le suivant : packagename_version-r1.bb avec r1 le numéro du release (s’il n’est pas spécifié, sa valeur par défaut est r0). Par exemple, dans la couche Yocto de la figure précédente, nous avions une recette pour la construction d’un package linux-yocto de version 5.4.
Note : Pour choisir cette recette dans le build d’une machine, au cas où il y’en a plusieurs pour différentes versions, il suffit de spécifier dans le fichier
machine.confla version préférée en utilisant la notation suivante :PREFERRED_VERSION_linux-yocto = "5.4"
Construction d’une image temps réel pour la BeagleBone Black
Préparation du Workspace
Pour utiliser le projet Yocto, il est nécessaire d’abord d’avoir une machine de développement avec un minimum de 50 Go d’espace disque libre et qui exécute une distribution Linux prise en charge (voir le lien).
- Installation des packages essentiels :
Ce sont les principaux outils et packages nécessaires à la construction avec le projet Yocto. Ceux-ci incluent le compilateur GNU GCC, un système de contrôle de versions, plus d’autres packages, selon ce qu’on veut faire (ajouter du support graphique, générer la doc … etc). Ci-dessous la commande pour obtenir l’essentiel sur Ubuntu :
$ sudo apt-get install gawk wget git-core diffstat unzip texinfo gcc-multilib build-essential chrpath socat cpio python python3 python3-pip python3-pexpect xz-utils debianutils iputils-ping libsdl1.2-dev xterm
- Récupération des couches de métadonnées nécessaires :
Pour notre cible BBB, nous allons se baser sur la couche Poky, mais en plus, nous avons besoin de la couche BSP spécifique au hardware de la carte BBB. Pour cela, nous allons utiliser la couche meta-ti de la part de Texas Instrument (qui est le vendeur du SOC amx335 de la carte BBB) fournie dans la repos officielle du projet Yocto. Dans cette couche, en plus des recettes BSP qui incluent les configurations hardwares, nous trouvons les recettes de construction des noyaux Linux-rt et non-rt fournies par TI, ainsi que des recettes personnalisées avec des fonctionnalités supplémentaires compatibles avec la carte BBB.
Pour notre image nous avons besoin donc, de deux couches : Poky, plus meta-ti. Comme ces deux couches sont des repos Git contenant plusieurs branches, nous allons se baser sur les commits sumo19.0.0 (de la branche sumo) pour Poky et ti2018.02 pour meta-ti (ce choix est basé sur les travaux de Bootlin).
Sous un nouveau dossier yocto_workspace, exécuter les commandes suivantes dans le terminal pour récupérer le code source des deux repos :
$ git clone https://git.yoctoproject.org/git/Poky
$ git clone https://git.yoctoproject.org/git/meta-ti
$ cd Poky && git checkout -b BBB sumo-19.0.0
$ cd meta-ti && git checkout -b BBB ti2018.02
Configuration des couches Yocto
-
Configuration de la couche Poky :
Nous commençons premièrement par “sourcer” le fichier
oe-init-build-envqui permet de créer l’environnement de build :$ cd Poky && source oe-init-build-envApres exécution, nous nous trouvons avec un nouveau dossier
buildsous le répertoirePoky, contenant deux fichiers de configuration dans un sous-dossierconf:bblayers.confetlocal.conf. Ces deux fichiers sont à la base de toute la configuration du système de construction.Le premier fichier
bblayers.conf, comme son nom l’indique, il sert à configurer les couches dans le système de construction. Ce fichier contient, parmi d’autres informations, le chemin vers toutes les couches qui seront utilisées dans la construction sous la variableBBLAYERS. Ci-dessous un aperçu sur le contenu par défaut de cette variable :
Notre intérêt est d’utiliser la couche
BSPmeta-ti, pour cela nous devons remplacer la dernière couchemeta-Poky-bsppar le chemin vers la couchemeta-tique nous avons téléchargée. Les deux première couchesmetaetmeta-Pokyconstituent l’ensemble des métadonnées de base du système de construction et nous devons les garder.Pour le deuxième fichier
local.conf, il sert à définir toutes les configurationsPokyde l’utilisateur local. Dans ce fichier nous définissons des valeurs pour différentes variables de configuration. Toute variable définie dans ce fichier remplace toute autre définition de cette variable dans la reposPoky(sauf si celle-ci est codée en dur : en utilisant=à la place de?=). Ci-dessous, les modifications que nous devons apporter à ce fichier pour notre cibleBBB:-
Configuration de la machine cible :
MACHINE = "beaglebone". Attention : à ne pas confondre avecbeaglbone-yocto, ce sont deux machines différentes. N’oubliez pas de commenter toute autre définition de cette variable. -
Ajouter les packages essentiels de développement (
gcc,make,pkgconfig…) plus les outils de profilage (modulelttng,valgrind, …) à l’image générée :EXTRA_IMAGE_FEATURES ?= "debug-tweaks tools-sdk tools-profile"
-
-
Configuration de la couche
meta-ti:Cette couche représente notre couche
BSP. Elle contient des fichiers de configuration pour plusieurs machines sous le répertoireconf/machine. Parmi ces fichiers, on trouvebeaglbone.confqui correspond au fichier de configuration pour notre carteBBB(c’est le nom de ce fichier que nous avons donné à la variableMACHINEdans le fichierlocal.confde la couchePoky). En plus du dossierconf, nous trouvons des dossiers de recettes pour différents packages :kernel,connectivity,graphics,multimedia…Sous le dossier
recipes-kernel/linuxnous trouvons la recette dunoyau-rtlinux-ti-staging-rt_4.14.bbque nous allons utiliser pour construire notre image temps réel.L’unique modification de cette couche, concerne le fichier de configuration
conf/machine/beaglbone.conf. Dans ce fichier nous devons indiquer au système de construction que nous voudrons utiliser lenoyau-rtdans lebuildde l’image pour cette machine, et ce, en se basant sur la recettelinux-ti-staging-rt_4.14.bb. Cette modification consiste d’ajouter les deux lignes suivantes dans le fichier de configuration :PREFERRED_PROVIDER_virtual/kernel = "linux-ti-staging-rt" COMPATIBLE_MACHINE_beaglebone = "beaglebone"Il est nécessaire aussi d’intégrer les modules noyau dans l’image finale en ajoutant la ligne ci-dessous :
MACHINE_EXTRA_RRECOMMENDS += "kernel-modules"
Création d’une image RT
Après configuration des deux couches, notre système de build est prêt pour générer une image Linux. Par défaut, la couche Poky fournit un ensemble de type d’image prête à être construite avec Bitbake : core-image-minimal, core-image-sato, core-image-base…
Pour construire une image minimale, il suffit d’exécuter la commande :
$ Bitbake core-image-minimal
A la fin d’exécution de Bitbake, les artéfacts de construction sont générés dans le dossier build/tmp/deploy/image/beaglbone/ :
-
am335x-boneblack.dtb: ce fichier correspond au Device Tree Blob, qui décrit les périphériques de la carteBBBau noyau Linux. -
MLO: Memory Loader, qui sert à initialiser le système et chargeru-boot. -
u-boot.img: l’image du bootloaderu-boot. Le rôle final de u-boot est de charger le noyau Linux dans la DDR et de lui passer le contrôle. -
zImage: c’est l’image binaire du noyau Linux ! -
core-image-minimal.rootfs.tar.xz: fichier compressé du système de fichier Linux. Note : Le dossierbootdu rootfs contient par défaut lazImageet le fichierdtb. -
modules-4.14.93-r0.tgz: compressé des modules que nous avons construits. -
core-image-minimal.rootfs.wic.xz: ce fichier compressé contient tous les éléments précédents dans une seule image de type.wic. Cette image inclut des commandes de partitionnement permettant d’automatiser le portage de tous les éléments de l’image dans le support de la plateforme cible (ex : carte microSD). Note : le nomWICest dérivé deOpenEmbeddedImage Creator :OEIC->WIC
Tous les artéfacts générés sont spécifiés par les recettes Bitbake liées à l’image construite : image-core-minimal.bb, et à la machine beaglbone.conf.
Pour le temps de construction écoulé de cette image minimale, il dépend essentiellement de deux paramètres : le débit internet et la puissance de calcul de la machine hôte. Sur ma machine locale (2 coeurs et un débit moyen de 500Ko/s), le build de l’image minimal a pris environ 6 heures. Après le premier build, Le projet Yocto garde le code source de tous les packages qui a construit sous le dossier build/downloads pour ne pas les retélécharger dans les prochains build.
Comme cette image n’est qu’une image minimale, elle ne contient que le nécessaire des outils et librairie pour faire marcher une version Linux minimaliste. Donc, on y trouve ni outil de communication : telnet, ssh.., ni package manager et surtout aucun outil de tests temps réel comme le package rt-tests.
Pour résoudre cela, l’une des solutions est d’essayer d’installer tous les packages manquants de façon manuelle. Or, à cause des différentes dépendances entre les packages et les librairies… cette solution risque d’être très fastidieuse. La deuxième solution, qui est plutôt à portée de main, est de demander à Bitbake de les installer pour nous, comme les recettes de tous les packages dont nous avons besoin existent déjà dans la couche Poky.
Nous avons décidé de créer une nouvelle image (recette) appelée beaglbone-ti-image-rt.bb, dans laquelle nous spécifions toutes les caractéristiques et packages supplémentaires dont nous avons besoin. Pour ne pas recréer une recette à zéro de toute la base de l’image, nous allons baser celle-là sur l’image existante core-image-base.bb.
Le contenu de cette nouvelle image est présenté dans la figure ci-dessous :
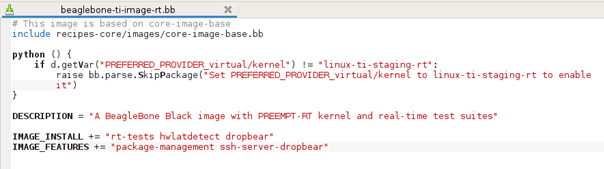
Premièrement, nous avons commencé par importer l’image core-image-base.bb. Puis, nous avons créé un script python (optionnel), pour stopper Bitbake si l’utilisateur n’a pas spécifié son noyau préféré au noyau-rt de TI : linux-ti-staging-rt. En addition, nous ajoutons les packages et fonctionnalités supplémentaires ci-dessous à l’image finale via les variables IMAGE_INSTALL et IMAGE_FEATURES :
-
rt-testsethwlatdetect: ces deux packages contiennent les outils de test temps réel, commecyclictest,hackbench… -
dropbear: ce package contient le clientsshdropbear. -
package-managment: ce package permet d’installer les outils de gestion des packages apt. -
ssh-server-dropbear: Installer le serveursshminimaldropbear.
IMPORTANT : Pour respecter la structure des couches Yocto, cette nouvelle recette est placée sous un nouveau dossier images/ dans le dossier recipes-core/ de la couche meta-ti.
Comme précédemment, nous générons cette nouvelle image en lançant la commande :
$ Bitbake beaglbone-ti-image-rt
A la fin de l’exécution, qui prend bien beaucoup plus de temps que l’image minimale, nous obtenons la sortie suivante :
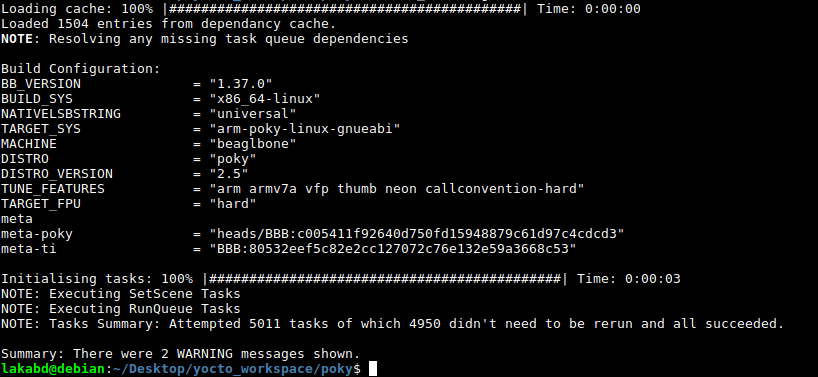
Dans le dossier build/tmp/deploy/image/beaglbone/, nous trouvons les artéfacts cités précédemment.
Portage de l’image
Le fichier qui nous intéresse pour le portage de l’image sur une carte microSD correspond au fichier WIC. Ce fichier contient toutes les commandes nécessaires pour partitionner automatiquement la carte microSD et copier dans chaque partition les fichiers correspondants. (Il est possible aussi de porter manuellement tous les éléments de build sur la carte SD, à la place d’utiliser le fichier WIC)
Premièrement, nous commençons par décompresser le fichier beaglebone-ti-image-rt.rootfs.wic.xz avec la commande unxz. Pour voir le contenu du fichier .wic, il existe l’outil wic fourni avec OpenEmbedded. Il suffit de sourcer le script oe-init-build-env pour l’utiliser :
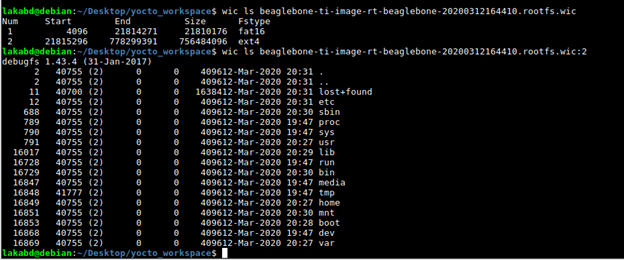
La commande $ wic ls file.wic permet d’afficher les deux partitions contenues dans le fichier. Pour afficher le contenu de chaque partition, nous ajoutons le numéro de la partition devant le nom du fichier $ wic ls file.wic:2. D’après la figure ci-dessus, nous remarquons que notre fichier wic contient deux partitions : une de type Fat16 qui contient les fichiers du bootloader, et l’autre de type ext4 qui contient le system de fichier root.
Avant de commencer le portage, nous insérons la carte microSD dans la machine hôte et nous exécutons la commande lsblk pour savoir le nom du volume donné à la carte microSD :
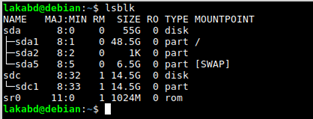
Dans ce cas il s’agit du périphérique sdc, avec une partition montée sdc1. Nous démontons, premièrement, cette partition pour la détachée du système de fichiers avec la commande :
$ sudo umount /dev/sdc?
Une fois la partition démontée, nous écrivons le fichier d’extension .wic directement sur l’ensemble du périphérique représentant la carte microSD :
$ sudo cp beaglbone-ti-image-rt.wic /dev/sdc
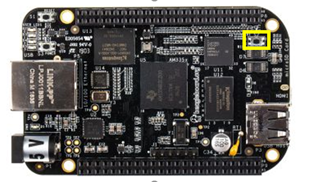
A la fin de cette opération, la carte microSD est prête et nous pouvons l’éjecter de la machine hôte et l’insérer dans la BBB. Avant de démarrer la carte, il faut bien savoir les configurations de démarrage – l’ordre de boot - par défaut. Pour la BBB il y en existe deux :
- Bouton S2 non appuyé lors de la mise sous tension de la carte :
- MMC1 (eMMC)
- MMC0 (SD card)
- UART0
- USB0
- Bouton S2 appuyé lors de la mise sous tension de la carte :
- SPI0
- MMC0 (SD card)
- USB0
- UART0
Donc pour empêcher la carte de démarrer à partir de l’eMMC en premier, il faut rester appuyer sur le bouton S2 de la carte avant alimentation.
En branchant un adaptateur usb/FTDI au port UART de la BBB, et à travers minicom, nous obtenons la sortie suivante :
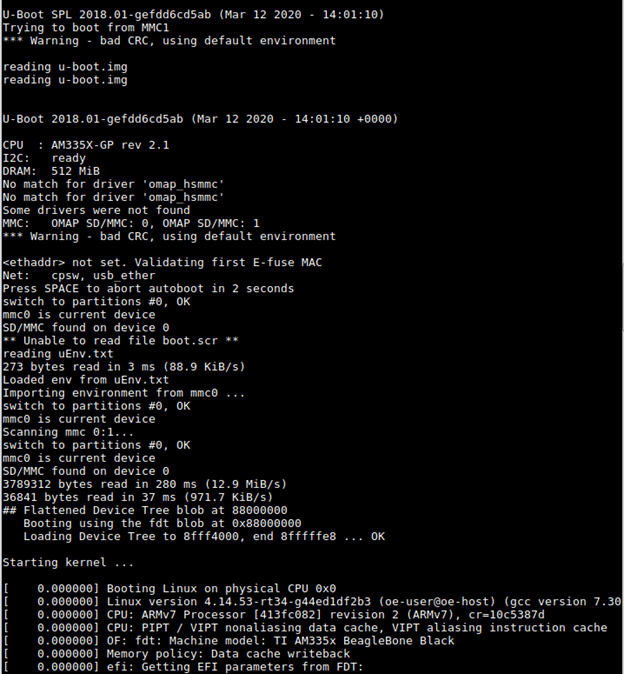
Donc, nous remarquons bien le bon démarrage du noyau Linux à partir de la carte microSD.
Pour savoir s’il s’agit d’une image temps réel (patchée avec PREEMPT_RT), il suffit de voir la sortie de la commande $ uname -a si elle affiche le string PREEMPT RT, ou, de voir dans le fichier de configuration du noyau, si l’option CONFIG_PREEMPT_RT_FULL existe et activée. La figure ci-dessous montre que notre image est bel et bien patchée avec PREEMPT_RT :
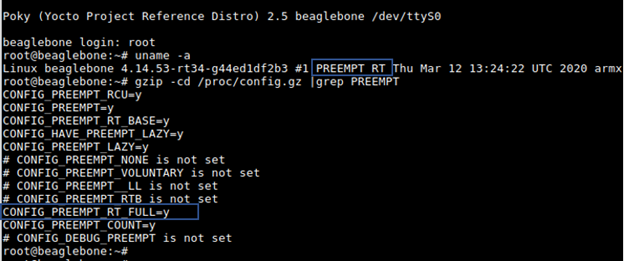
A noter aussi, que cette image contient tous les outils que nous avons installés : ssh, apt, cyclictest…
Comparaison de performance
Pour réaliser le test de performance, nous avons construit une deuxième image pour la BBB , mais cette fois-ci l’image n’est pas RT c.à.d elle n’est pas patchée par PREEMPT_RT. Pour cela deux modifications ont été apportées à la configuration précédente :
-
Remplacer le contenu de la variable
PREFERRED_PROVIDER_virtual/kernelparlinux-ti-stagingdans le fichierbeaglebone.confde la couchemeta-ti. -
Dans la recette de l’image créée
beaglbone-ti-image-rt.bb, enlever le script python et renommer cette image àbeaglebone-ti-image.bb. Il suffira après d’appeler cette image dansBitbake.
Maintenant que nous avons les deux images : RT et non-RT avec les packages de test temps réel installés, nous pouvons comparer les deux systèmes. Nous allons baser notre test sur deux outils de benchmarking qui sont souvent utilisés dans ce contexte :
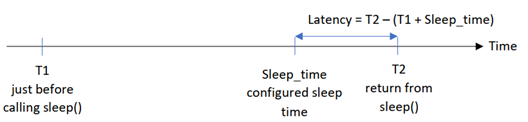
Cyclictest: Ce programme permet de qualifier la latence du système en mesurant le temps écoulé entre l’expiration d’un timer et le moment de l’exécution de la tâche qui l’a activé :
Hackbench: Ce programme effectue des mesures de commutation entre threads et processus qui communiquent par des pipes ou des sockets. Ce programme étant très intensif, nous allons l’utiliser comme élément perturbateur pour les mesures effectuées aveccyclictest.
Les paramètres utilisés pour chaque outil sont décrits ci-dessous :
$ cyclictest -a 0 -p 99 -m -n -D 5m -q
-a 0 : exécuter une seule tache sur le CPU0
-p 99 : utiliser la priorité temps réel FIFO 99
-m : Invoquer mlockall() pour verrouiller la mémoire virtuelle du processus en mémoire physique (pour éviter les problèmes de page fault).
-n : utiliser la fonction clock_nanosleep() à la place de nanosleep().
-D 5m : exécuter le test pendant 5 minutes. Ce qui correspond à 300000 déclenchement pour la valeur de sleep() par défaut qui est de 1 ms.
-q : --quiet : afficher le résultat jusqu’à la fin de test.
$ hackbench -s 1024 -l 100 --threads -f 40 -g 10
-s 1024 : configurer la taille des messages échangés à 1024 octet.
-l 100 : configurer le nombre de messages échangé à 100.
--threads : utiliser des threads à la place des process.
-f 40 : chaque émetteur/récepteur peut ouvrir 40 ‘file descriptor’.
-g 10 : démarrer 10 groupes d’émetteur/récepteur.
Les tests sont effectués sur les deux images Linux-RT et non-RT. Nous allons réaliser deux scénarios de tests différents pour chaque image :
-
Un premier test sans charge : nous lançons l’outil
cyclictesttout seul. -
Un deuxième test avec charge intensive : nous lançons
cyclictestdans un terminal, et en même temps, nous lançonshackbench.
Comme nous exécutons l’outil cyclictest pour une durée de 5 minutes, lors des tests avec charge il faut empêcher hackbench de terminer avant cette durer. Pour cela, nous avons intégré la commande hackbench dans une boucle while à l’aide du script Bash ci-dessous :
#!/bin/bash
while :
do
hackbench -s 1024 -l 100 --threads -f 40 -g 10
done
Après connexion à la carte, nécessairement en ssh pour être capable d’ouvrir deux terminaux, nous exécutons les scénarios de tests l’un après l’autre sur les deux images Linux.
Le tableau ci-dessous, résume les résultats obtenus de latence (mesurés par cyclictest) pour chaque cas :
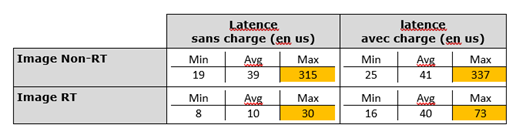
Pour les deux scénarii, nous remarquons une différence sur tout l’intervalle de latence, avec un écart plutôt important pour la latence maximale entre les deux images : rapport de 10 pour le premier scénario et de 4.5 pour le deuxième, ce qui est bien attendu, comme les taches temps réel de cyclictest prennent plus du temps CPU sur l’image RT (ayant un noyau préemptif) que sur l’image normale.
Références
https://www.yoctoproject.org/docs/1.6/bitbake-user-manual/bitbake-user-manual.html
https://www.yoctoproject.org/docs/2.5/dev-manual/dev-manual.html#understanding-and-creating-layers
https://bootlin.com/doc/training/yocto/yocto-labs.pdf
https://imxdev.gitlab.io/tutorial/How_to_inspect_OpenEmbedded_kickstart_wic_files/